Manipulatory
SYSTEMY MANIPULACJI:
- tworzone są na bazie manipulatorów posiadających zróżnicowane konstrukcje i parametry techniczne;
- projektowane są i wykonywane pod indywidualne potrzeby realizowanych kompleksowych procesów technologicznych.
- mogą być również produkowane jako urządzenia niezależne.
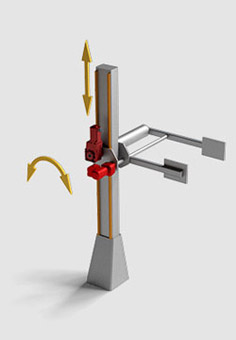
MANIPULATORY PORTALOWE

Manipulator portalowy ramowy jedno/dwuosiowy (z obrotem lub bez)

Manipulator portalowy ramowy dwu/trzyosiowy (z obrotem lub bez)

Manipulator portalowy ramowy trzy/czterosiowy (z obrotem lub bez)

Manipulator portalowy bramowy trzy/czterosiowy (z obrotem lub bez)
MANIPULATORY DEDYKOWANE

Manipulator do rozładunku stosów szyb (płyt)

Manipulator przesypująco-dozujący
Manipulator piętrzący-rozpiętrzający
PRZEJEZDNE ROBOTY

Przejezdny robot podwieszony

Sześcioosiowy robot przejezdny
stosowany głównie do wielostanowiskowej paletyzacji